最新企业新闻
推荐文章
热门标签
车载摄像头评测
车载摄像头面对的都是运动影像,如果摄像头指标不合格,对车辆来说这样子的车载摄像头简直就是摆设,几乎没有什么用。对于车载摄像头需要测试哪些项目?以下我们列举了个表格,作为车载摄像头评测参考项目:
| 序号 | 测试项目 | 测试子项目 | 测试目的 |
| 1 | 曝光 | 曝光范围 | 测试夜晚至白天(夏天晴天中午)是否均能正确曝光 |
| 场景切换响应时间 | 测试车辆进出隧道环境亮度突变时能否快速自适应 | ||
| 2 | 颜色 | 色彩还原 | 视频中的颜色是否与实物颜色一致 |
| 颜色均匀性 | 画面内色彩分布是否均匀 | ||
| 3 | 视场角 | 水平视场角 | 车载摄像头是否满足广角及其标称值 |
| 4 | 清晰度 | MTF | 测试画面清晰度,镜头是否满足Sensor |
| 质感 | 细节纹理质感的保留能力 | ||
| 视觉分辨率 | 测试车载摄像头的视觉极限分辨率 | ||
| 5 | 噪声 | ||
| 信噪比 | 信噪比越高,则画面会更加干净和稳定,信噪比(S/N)越低,则画面会看起来很嘈杂 | ||
| 动态范围(宽容度) | 对比度(能够分辨的最亮,能够分辨的最黑),最亮为接近过曝的亮度,最黑为只剩下噪声最亮的黑 | ||
| 6 | 伪像 | 畸变 | 相对实物出现的扭曲和变形 |
| 暗角 | 画面边角部分相对中间部分下降量 | ||
| 锐化 | 照片中由锐化算法加入的比实物对比度更高的黑白边。 |
1、曝光测试包括两个测试小项:曝光范围和场景切换响应时间。
曝光范围:测试车载摄像头在各种光照环境下能否正确曝光,使用国内品牌的天友利标准光源,以确认车载摄像头在这些环境中是否可以正确曝光。
场景切换响应时间:从明到暗的环境或是从昏暗到明亮的场景时,车载摄像头切换显示所需要的响应时间。场景环境切换响应时间越短越好。车载摄像头在明暗情景切换时屏幕会短暂得出现“一片白”或者“一片黑”。我们使用LB-8110辉度箱 LV2档模拟隧道内昏暗环境,LV10档模拟隧道外的明亮环境,两档切换时间为0.2秒,测试行车记录仪的场景切换时的响应时间。0.2秒对于车载摄像头来说,效果还是不错的。
2、颜色
对于交通事故、犯罪现象发生以后,车载摄像头能否忠实地还原色彩就显的非常重要了。颜色测试分为两个测试小项:色彩还原和颜色均匀性。
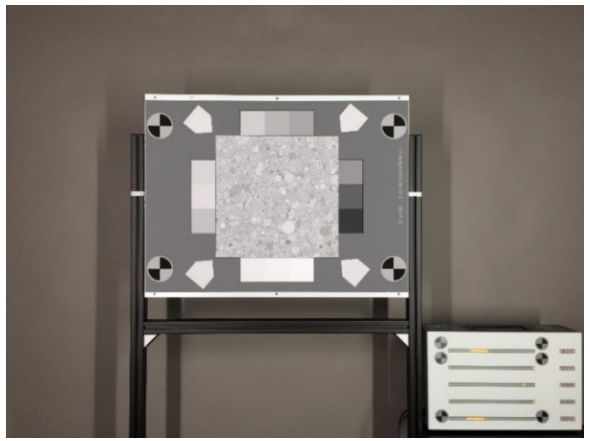
色彩还原是测试车载摄像头在各种光照环境下还原色彩的能力,在标准光源箱中使用车载摄像头拍摄24色卡,把拍摄到的画面输入iqstest图像质量测试软件进行对比分析,看看是否出现了偏色。

标准的24色卡车载摄像头拍摄
颜色均匀性是测试颜色是否均匀,通过影像质量测试软件分析各种光照环境下颜色的分布。下图是360 J501C在A光源下的颜色均匀性测试结果,可以看到颜色并不均匀,出现了色斑、色环。
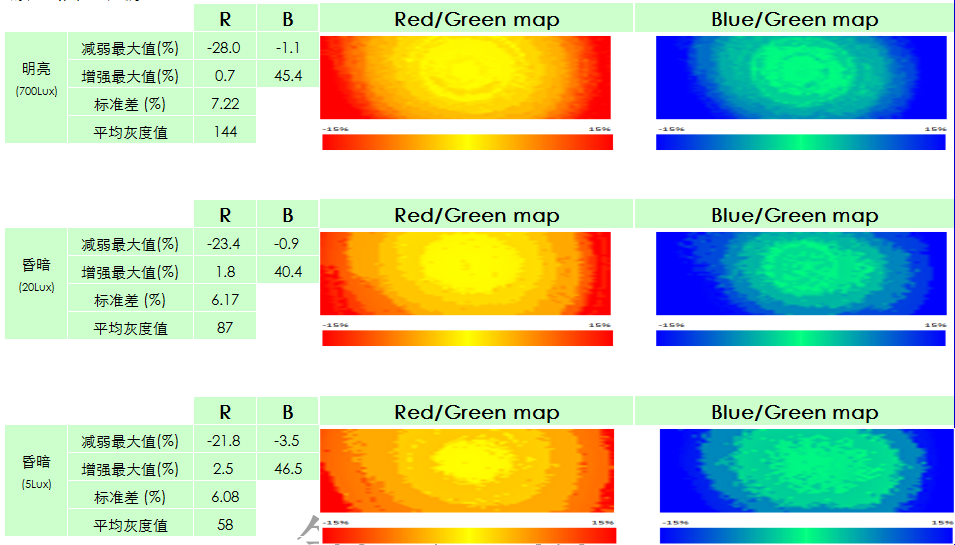
360 J501C颜色均匀性测试
3、视场角
视场角指的是车载摄像头的可视角度,或者是镜头视场角。镜头视场角并不等于画面视场角,因为匹配对位及校正校准的原因,传感器对角线必定会小于镜头的像场,所以画面视场角往往会小于镜头视场角。另外对于广角镜头来说,因为畸变,角落部分挤压了过多的景物,往往也无法分辨。我们选用水平视场角来对各个行车记录仪进行评测。根据实测和计算,我们发现水平视场角以接近120度为佳,可覆盖整个车头,且3米远外即可全面覆盖三车道,一旦发生事故,相邻车道的车况也可一览无余。
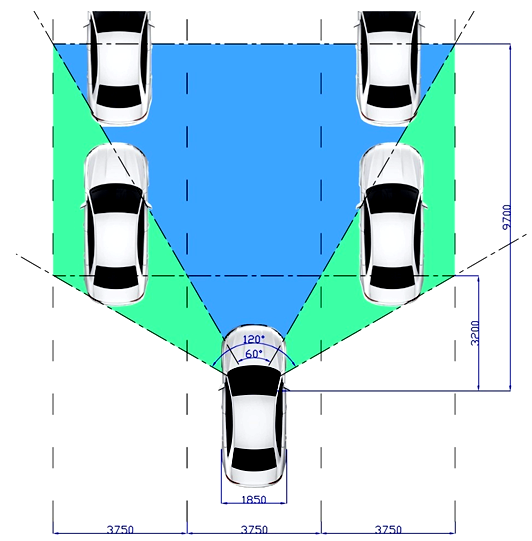
水平视场角
4、清晰度
车载摄像头的清晰度测试分成三个测试小项:MTF、质感和视觉分辨率。MTF(调制解调函数)用来测试相机的清晰度,可以简单的认知为对比度。当黑白对比度低于10%时,人眼基本上就无法分辨,所以我们也把10%MTF称为极限分辨率。若MTF10%对应的空间频率达到0.5 Cycle/pixel,则可认定镜头分辨率已超越传感器,则相机像素数越高,成像分辨率越高。但当MTF10%对应的空间频率低于0.5Cycle/pixel 时,则镜头的分辨率无法满足传感器,即相机像素高不代表成像分辨率也高,也就说会造成“浪费”。
车载摄像头的水平视场角基本在100度以上,属于广角范畴。我们采用法国DxO Analyzer的MTF 鱼眼测试模块,对行车记录仪的MTF进行测试,分别测定画面中心,上下左右四边和四个角的MTF。
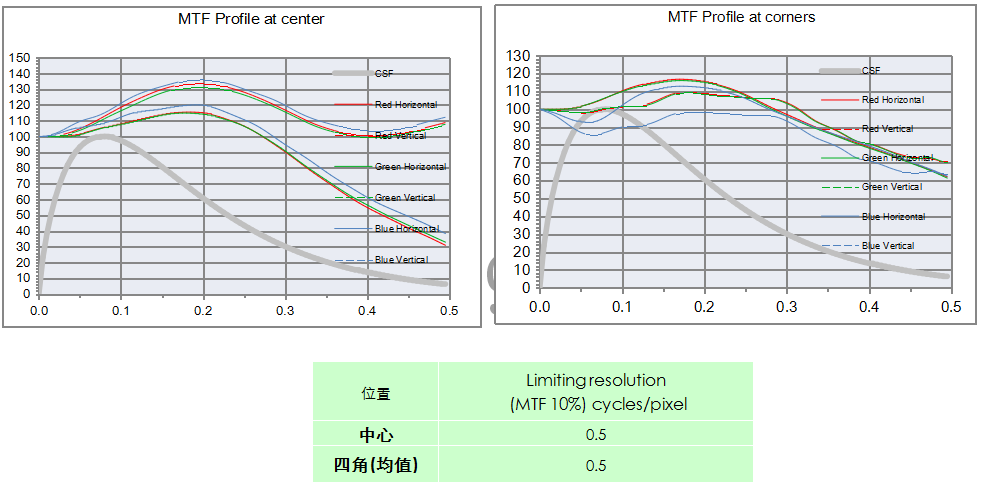
360 J501C的MTF测试
质感指的是车载摄像头拍摄的纹理细节表现能力。很多车载摄像头为了提高清晰度,均使用了极强的锐化算法,相应的很多细节则保留较少。虽然轮廓清晰,但将人脸皮肤拍摄成胶皮,将树冠拍摄成一团绿,这样的成像缺少细部层次感和质感。纹理测试卡(落叶图、也称枯叶图)是专门测试成像纹理质感的工具。
枯叶图
视觉分辨率
ISO12233图像分辨率测试卡主要测试相机能够拍摄到黑白线对,能够分辨出来的位置,单位为LW/PH(line Width per Height,线宽每像高)。对于高清视频来说,理论上的最大值是1080LW/PH,由于拍摄环境与偏差的影响,测试结果往往在980左右。另外ISO12233 2000已经很少用了,常用的是ISO12233 2014。
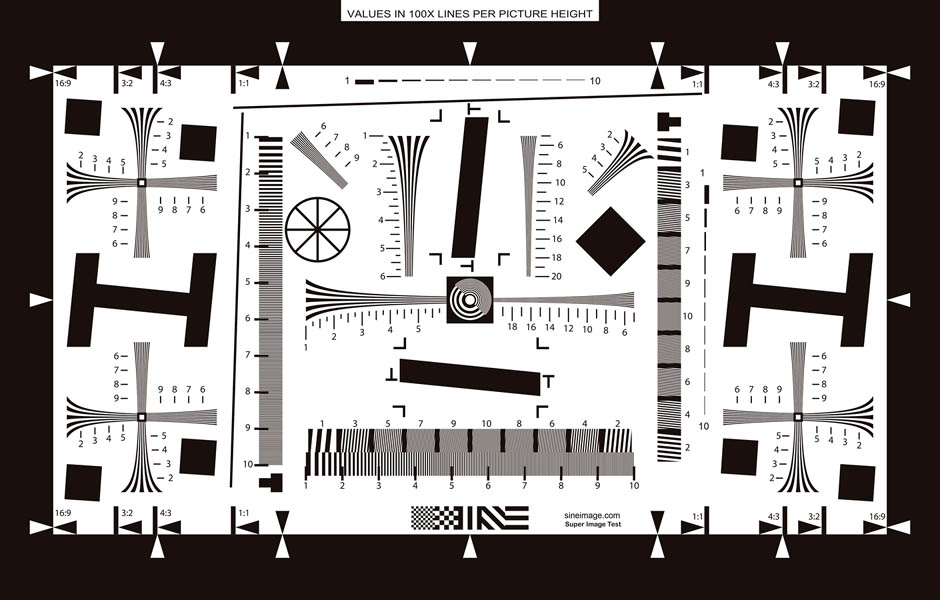
ISO12233 2000 分辨率测试卡
由于畸变的原因,相同大小的物体出现在画面不同位置时,在画面中的大小是不一致的,对于广角来说,画面中心往往会比在画面四角大很多,所以,我们会看到画面中心的视觉分辨率会超过1080LW/PH,但相应的四角就会差更多。车载摄像头一般为超广角,其对焦距离一般设置在2米以外,所以如果要测试视觉分辨率,测试卡一定会非常大。
5、噪声
在图像质量测试里,噪声是在图像采集转化的过程中,随机加入的非线性的伪信号(注意不是日常生活中声音信号,而是电信号)。行车记录仪的噪声测试分为两个测试小项:信噪比(S/N信噪比越高越好)和动态范围。信噪比的单位为dB, 信噪比的典型值为36~45db,高于45dB,则画面干净,基本察觉不到噪声;若低于36dB,则就有明显可感知的噪声,画面看起来较为嘈杂。下图是信噪比的对比效果。
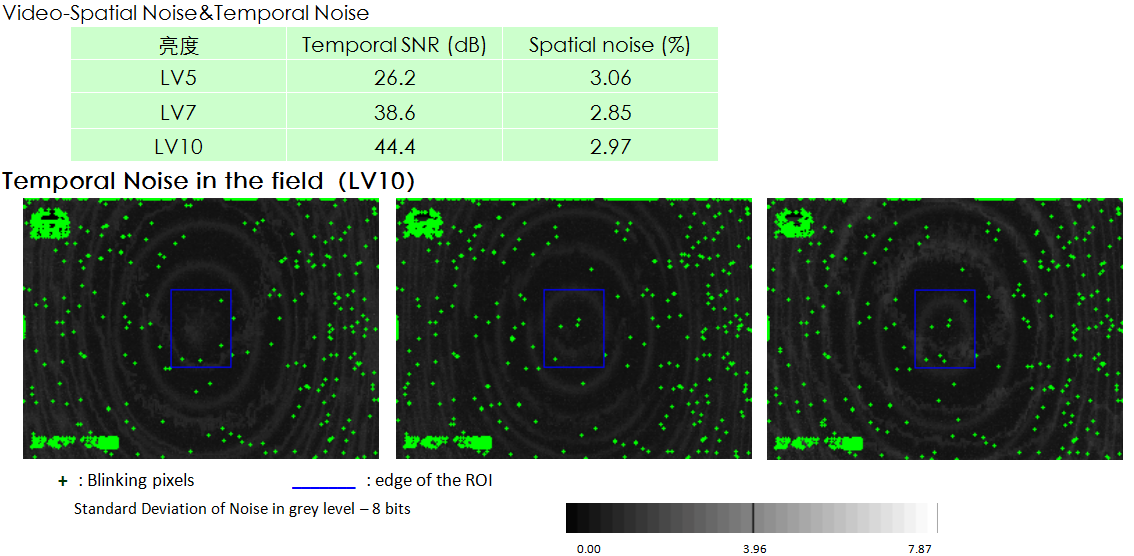
360 J501C信噪比测试
动态范围是指车载摄像头能记录原稿的色调范围,即从最黑到最亮时,车载摄像头可以分辨的最高亮度与最低亮度的比值。动态范围越大,能采集到的明暗范围会更宽广,其所能表现的层次越丰富。一般来说,若不做特殊处理,动态范围一般在8个Ev,也就是256左右,而加了HDR算法等,则可容纳更多明暗对比。
6、伪像
伪像指的是图像发生不符合真实情况的变化,包括畸变、锐化和暗角。畸变是照片和视频中物体相对实物本身出现的扭曲和变形,可分为桶形畸变和枕形畸变。对于广角来说,一般都是桶形畸变。下图,水平视场角同为118度,但惠普F520的畸变明显比GoPro Hero4大很多,其中心块所占的像素数更多,畸变的效应也更明显。
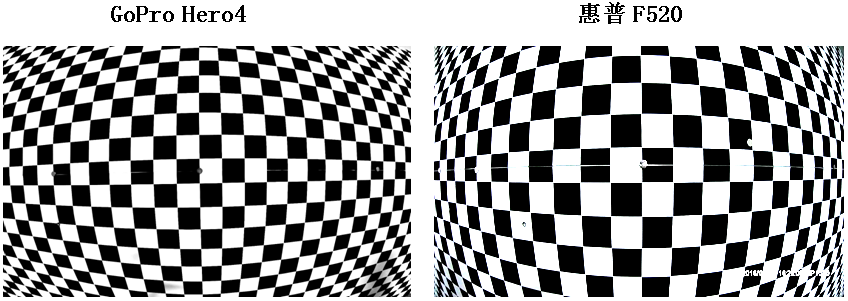
畸变测试
锐化的原理是在黑白边界由算法人工加入比实物本身更黑和更白的边,相当于重新描了一次边,适度的锐化可提升画面清晰度,而过度的锐化则会掩盖原有的边缘和层次反而会失真。对比360 J501和惠普F520,明显惠普F520锐化过度,如下图:
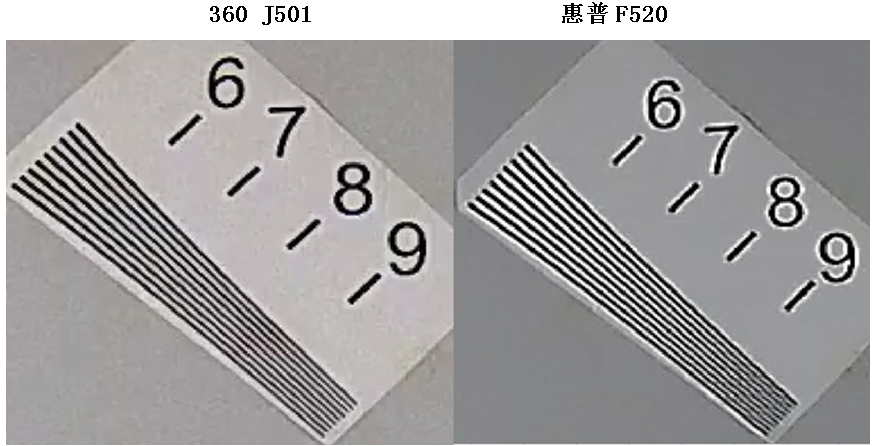
锐化测试对比
使用广角镜头拍出来的照片,往往画面的四角会较中心暗一些,通过测试视频画面四角相对于中心亮度下降的百分比来衡量车载摄像头的抗暗角能力。

暗角测试
到此为止,我们对摄像头评测的6个项目就基本完成。对于有些测试的细节部分,如果你感兴趣,可以翻看本站的一些文章作为参考。
为你精选
-

- 如何选择适合印刷行业的对色灯箱
- 2024-03-21
如何选择适合印刷行业的对色灯箱
在印刷行业中,对色灯箱(也称为色彩评估柜或色彩匹配柜)是一种至关重要的工具,用于确保色彩的一致性和准确性。正确的色彩匹配对于保证产品质量和客户满意度至关重要。本文将指导您如何选择合适的对色灯箱,以满足印刷行业的需求。 了解对色灯箱的功能 对色灯箱的主要功能是在标准化的照明条件下,模拟不同光源下的.......2024-03-21 新闻中心 -
- 对色灯箱的基本参数和色温
- 2024-03-20
对色灯箱的基本参数和色温
对色灯箱分为国产灯箱和进口光源对色灯箱两种,进口光源灯箱价格昂贵,校准度精确度高,主要针对大型企业以及对颜色要求很严格的企业使用;而国产标准对色灯箱价格便宜,适用于大部分小企业。 对色灯箱参数 标准光源对色灯箱通常是多种光源的组合体,帮助用户提供模拟日光的有D65、D50,模拟商店展示厅灯光.......2024-03-20 新闻中心 -
- 对色灯箱使用方法和日常保养维修事项
- 2024-03-20
对色灯箱使用方法和日常保养维修事项
对色灯箱使用方法 纺织印染行业,对色运用最多的是对色灯箱,使用的方法不当,导致使用者出现对色色光的偏差,如何使不同观察者在灯箱下观察的色光一致呢?那么我们就要正确标准使用对色灯箱,可以从9个方面来着手。 1、观察角度 以下各点都是标准对色灯箱所必须配备的各项设施,此外观察角度也会直接影响到.......2024-03-20 新闻中心 -
- 摄像补光灯箱用什么灯光效果好
- 2024-03-14
摄像补光灯箱用什么灯光效果好
在摄像过程中,补光灯箱的使用对于提升画面质量、突出主题、营造氛围具有不可或缺的作用。然而,选择合适的灯光效果对于补光灯箱来说至关重要,它直接影响到摄像作品的视觉效果和观众的观看体验。那么,摄像补光灯箱用什么灯光效果好呢?本文将从不同灯光类型的特点和适用场景出发,探讨这一问题。一、不同灯光类型的特点柔.......2024-03-14 新闻中心 -
- 什么是棋盘测试卡?有什么作用?
- 2024-03-07
什么是棋盘测试卡?有什么作用?
在数字化时代的今天,图像和视频的质量成为了衡量各类显示设备性能的重要指标。而为了确保显示设备的准确性和一致性,需要使用各种测试工具,其中,棋盘测试卡便是不可或缺的一种。那么,什么是棋盘测试卡,它又有哪些作用呢?本文将对此进行详细的探讨。 首先,我们来了解棋盘测试卡的定义。棋盘测试卡,顾名思义,.......2024-03-07 新闻中心 -
- 摄像头测试灯箱CC5100怎么样?有什么特点?
- 2024-03-06
摄像头测试灯箱CC5100怎么样?有什么特点?
随着监控设备市场的快速发展,摄像头测试灯箱作为确保摄像头性能和质量的关键工具,逐渐受到了广泛的关注。在众多品牌和型号的摄像头测试灯箱中,CC5100凭借其出色的性能和特点,成为了业内的佼佼者。本文将详细分析摄像头测试灯箱CC5100的性能和特点,帮助用户更好地了解该产品。一、CC5100摄像头测试灯.......2024-03-06 新闻中心 -

- 摄像头测试标准光源箱T90-7的构成与优势
- 2024-03-05
摄像头测试标准光源箱T90-7的构成与优势
随着摄像头技术的快速发展,其色彩准确性和图像清晰度的要求也日益提高。为了确保摄像头在各种光照条件下都能表现出色,摄像头测试标准光源箱T90-7应运而生。那么,这款标准光源箱究竟由哪些部分构成,又具备哪些优势呢? 一、构成部分 摄像头测试标准光源箱T90-7主要由以下几部分构成: 箱体结构:.......2024-03-05 新闻中心 -

- 摄像头测试灯箱的工作原理与测试方法
- 2024-03-01
摄像头测试灯箱的工作原理与测试方法
摄像头测试灯箱是一种专门用于测试摄像头性能的设备,广泛应用于摄像头生产、品质控制以及科研实验等领域。通过模拟不同光照条件和场景,摄像头测试灯箱可以评估摄像头的成像质量、色彩还原、动态范围、对比度等关键指标。本文将详细介绍摄像头测试灯箱的工作原理和测试方法。一、摄像头测试灯箱的工作原理摄像头测试灯箱主.......2024-03-01 新闻中心 -
- 工业摄像头和普通摄像头区别
- 2024-02-28
工业摄像头和普通摄像头区别
工业摄像头与普通摄像头的区别摄像头,作为一种捕获和传输视觉信息的设备,已经广泛应用于我们生活的方方面面,从家庭安全监控到智能交通系统,再到各种工业应用场景。然而,尽管摄像头的基本原理和功能在大多数情况下都是相似的,但工业摄像头和普通摄像头之间存在着一些显著的区别。应用场景的差异普通摄像头,如我们常见.......2024-02-28 新闻中心 -

- 搬迁通知
- 2023-04-26
搬迁通知
...2023-04-26 新闻中心
 扫一扫关注微信
扫一扫关注微信